AGV小車無刷驅動器操作原理及優點
來源:深圳市鑫海文科技有限公司|發布時間:2019-05-30 18:02
無刷直流(BLDC)馬達正在成為AGV小車的核心驅動器,而且AGV小車領域也逐步用無刷驅動器替代了有刷驅動器�。因為它摒棄了傳統的電動機中使用的機械換向器日益流行,與電子裝置取代它這提高了裝置的可靠性和耐用性。
BLDC電機的另一個優點是它可以制造得比具有相同功率輸出的電刷類型更小更輕��,使得前者適用于空間緊張的應用��。
缺點是BLDC電機確實需要電子管理才能運行��。例如�����,需要一個微控制器-使用來自傳感器的輸入來指示轉子的位置-以在正確的時刻激勵定子線圈��。精確的定時允許精確的速度和轉矩控制�,以及確保電機以最高效率運行��。
本文介紹了BLDC電機運行的基本原理��,并介紹了三相單元運行的典型控制電路。本文還考慮了一些集成模塊-設計人員可以選擇簡化電路設計-這些模塊專為BLDC電機控制而設計��。
AGV小車無刷操作優點
傳統電動機的電刷將動力傳遞給轉子繞組�����,轉子繞組在通電時轉入固定的磁場�����。固定刷和旋轉轉子上的旋轉金屬觸點之間的摩擦導致磨損。此外��,由于刷子與金屬接觸不良和電弧放電�����,可能會損失電源�����。
由于BLDC電機省去了電刷-而不是使用“電子換向器”-通過消除這種磨損和功率損耗來提高電機的可靠性和效率。此外�,BLDC電機還具有許多優于有刷直流電機和感應電機的優點�����,包括更好的速度與轉矩特性;更快的動態響應;無噪音操作;更高的速度范圍���。
此外,相對于電機尺寸的扭矩傳遞比率更高��,使其成為洗衣機和電動車等應用的理想選擇�,這些應用需要高功率但緊湊和輕便是關鍵因素。(但是��,應該注意的是�����,刷式直流電動機確實具有較高的啟動轉矩���。)
BLDC電動機被稱為“同步”型���,因為定子和轉子產生的磁場以相同的頻率旋轉����。這種布置的一個好處是BLDC電機不會經歷感應電機典型的“滑動”��。
雖然電機可以是單相���,兩相或三相類型���,但后者是最常見的類型���,并且是將在此討論的版本����。
BLDC電機的定子包括鋼制疊片�����,軸向開槽以沿內周邊容納偶數個繞組(圖1)。雖然BLDC電機定子類似于感應電機,但繞組的分布不同���。
圖1:BLDC電機的定子,顯示帶軸向繞組的開槽鋼環。
轉子由具有2到8個NS極對的永磁體構成。更多的磁鐵對增加了扭矩并平滑了所謂的扭矩波動��,使電機的功率輸出平穩�����。缺點是控制系統更復雜����,成本增加����,最高速度更低。
傳統上,鐵氧體磁鐵用于制造永磁體���,但現代單元傾向于使用稀土磁體。雖然這些磁鐵更昂貴,但它們產生更大的磁通密度,允許轉子在給定的扭矩下制造得更小��。使用這些強大的磁鐵是BLDC電機提供比相同尺寸的刷式直流電機更高功率的關鍵原因�。
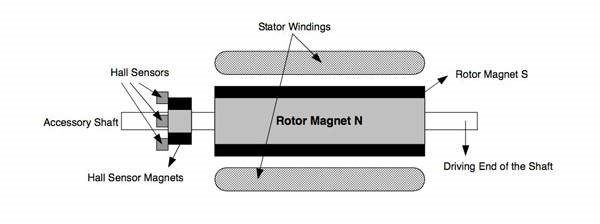
基本操作BLDC電機的電子換向器依次激勵定子線圈,產生一個旋轉電場,使轉子“繞”轉動����。N“電氣旋轉”等同于一次機械旋轉���,其中N是磁體對的數量�����。對于三相電機,三個霍爾效應傳感器嵌入定子中�,以指示定子和轉子相對于控制器的相對位置,以便它能夠以正確的順序和正確的時間激勵繞組���?��;魻杺鞲衅魍ǔ0惭b在設備的非驅動端(圖2)���。
圖2:霍爾傳感器嵌入BLDC電機的定子中���,以確定繞組激勵順序�����。
當轉子磁極通過霍爾傳感器時,會產生高(對于一極)或低(對于相反極)信號。如下面詳細討論的�,可以通過組合來自三個傳感器的信號來確定換向的確切順序���。
由于繞組通過相關磁場的運動���,所有電動機都產生電壓電位��。這種電位被稱為電動勢(EMF),根據倫茨定律,它在繞組中產生電流,其磁場與磁通量的原始變化相反�。簡而言之���,這意味著EMF傾向于抵抗電動機的旋轉��,因此被稱為“后”EMF。對于給定的固定磁通量和繞組數量的電動機���,EMF與轉子的角速度成比例。
但是反電動勢雖然增加了一些“拖動”電機�����,但可以用來獲得優勢����。通過監控反電動勢�����,微控制器可以確定定子和轉子的相對位置��,而無需霍爾效應傳感器。這簡化了電機結構�����,降低了成本��,并且消除了額外的布線和與電機的連接���,否則將需要支持傳感器��。當存在污垢和濕氣時,這提高了可靠性���。但是,固定電機不會產生反電動勢���,因此微控制器無法在啟動時確定電機部件的位置。解決方案是以開環配置啟動電機���,直到為微控制器產生足夠的EMF來接管電機監控。這些所謂的“無傳感器”BLDC電機越來越受歡迎��。
鑫海文長期致力于無刷電機方案的研發��,微型無刷電機的研發生產���。鑫海文擁有豐富開發應用經驗的專業研發技術團隊。選擇鑫海文�,個性化定制專業解決方案��。
本文由鑫海文(www.wlifestyles.com)原創首發,轉載請以鏈接形式標明本文地址或注明文章出處!

 在線客服
在線客服