歡迎您來到鑫海文



來源:深圳市鑫海文科技有限公司|發布時間:2020-03-05 16:29
智能無刷控制器在近幾年逐漸展露出來,并且受到了廣大用戶的青睞,其高性能的控制方式讓無刷電機可以更好的工作。今天就為大家盤點一下智能無刷電機控制器的控制原理及模式有哪些?
無刷電機控制原理
由微電子實現的控制單元有幾種高科技選擇。這可以使用微控制器,專用微控制器,硬接線微電子單元,PLC或類似的其他單元來實現。
模擬控制器仍在使用,但是它們無法處理反饋消息并進行相應的控制。利用這種類型的控制電路,可以實現高性能的控制算法,例如矢量控制,磁場定向控制,高速控制,所有這些都與電動機的電磁狀態有關。此外,還按常規實現了針對各種動力學要求的外環控制,例如滑動電機控制,自適應控制,預測控制等。
除了這些,我們還發現高性能的PIC(功率集成電路),ASIC(專用集成電路)等。這樣可以大大簡化控制和電力電子單元的結構。例如,今天我們在單個IC中具有完整的PWM(脈寬調制)調節器,可以在某些系統中替代整個控制單元。復合驅動器IC可以提供驅動三相轉換器中所有六個電源開關的完整解決方案。有許多相似的集成電路,并且每天都在增加。歸根結底,系統組裝可能只涉及一個控制軟件,所有硬件的形狀和形式都正確。
PWM(脈沖寬度調制)波可用于控制電動機的速度。在此,給定的平均電壓或流經電動機的平均電流將根據控制電動機速度的脈沖的開啟和關閉時間而變化,即,波的占空比控制其速度。在更改占空比(開啟時間)時,我們可以更改速度。通過互換輸出端口,它將有效地改變電動機的方向。
速度控制
無刷電機的速度控制對于使電機以期望的速度工作至關重要。無刷直流電動機的速度可以通過控制輸入直流電壓來控制。電壓越高,速度越高。當電動機在正常模式下運行或在額定速度以下運行時,電樞的輸入電壓通過PWM模型進行更改。當電動機在額定轉速以上運行時,通量會通過增加輸出電流來減弱磁通量。
速度控制可以是閉環或開環速度控制。
開環速度控制 –它包括通過斬波直流電壓來簡單控制施加到電動機端子的直流電壓。然而,這導致某種形式的電流限制。
閉環速度控制 –涉及通過電動機的速度反饋來控制輸入電源電壓。因此,根據誤差信號來控制電源電壓。
閉環速度控制包括三個基本組件:
1.一個PWM電路,用于生成所需的pwm脈沖。它可以是微控制器或定時器IC。
2.一種感測設備,用于感測實際的電動機速度。它可以是霍爾效應傳感器,紅外傳感器或光學編碼器。
3.電動機無刷驅動器,用于控制電動機的運行。
這種基于誤差信號改變電源電壓的技術可以通過pid控制技術或使用模糊邏輯來實現。
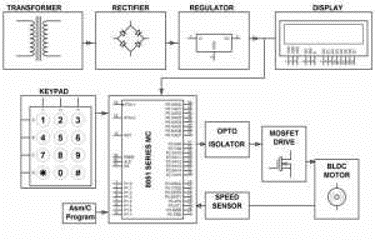
電機的運行通過光耦合器和MOSFET進行控制,其中輸入直流功率通過微控制器的pwm技術進行控制。當電動機旋轉時,由于其軸上存在白點,因此存在于其軸上的紅外燈會被白光照亮并反射紅外光。光電二極管接收該紅外光并使其電阻發生變化,從而導致所連接的晶體管的電源電壓發生變化,并且向微控制器提供脈沖以生成每分鐘的轉數。該速度顯示在LCD上。
在與微控制器連接的鍵盤中輸入所需的速度。所感測到的速度與所需速度之間的差是誤差信號,并且微控制器根據模糊邏輯根據誤差信號生成pwm信號,以將直流功率輸入到電動機。
因此,使用閉環控制,可以控制無刷直流電動機的速度,并且可以使其以任何所需的速度旋轉。

 在線客服
在線客服